CLASを利用したVRSC (仮想基準局(VRS) by CLAS)が発表になりました。また、CLASモジュール内蔵のRWS.DC(M)も発売(2022/10/末)になりました。この記事はVRSC発売時に書かれましたが、ほとんどの部分でRWS.DC(M)も共通です。
このガイドは、CLASの利用に際し、用途の適合性や対応方法などを示すものです。
私どもが実験などで得た知見などを公開することで特性などを理解いただき、良い点を引き出してご利用いただければと思います。
はじめに
VRSCは、DG-PRO1RWSなどとともにRTKを実現するみちびきの CLASを用いた仮想基準局です。RWS.DC(M)は受信機内で同様に仮想基準局を生成し自己利用します。この測位方式のことをPPP-RTK*1と呼びます。
この方式による測位はほとんどの方が未経験です。しくみなどからくる特徴や注意点などをご説明します。
CLASについて
精度
精度は定点 水平̟̟±6cm 垂直 ±12cmです。通常のRTK*2に比べると精度に劣ります。 また、ミスFixする確率も高くなりますので合わせてミスFixの項もご覧ください。
CLASから生成する観測データは完全ではありません。多くのタイミングで概ね問題ありませんが、衛星配置、電離層や大気圏の活動状態などにより特定の地域・時間帯などでFixが得られない場合もあります。
完全性を求める場合は、DG-PRO1RWSなどでの実基準局によるRTKを優先的にご検討ください。
サービス範囲
配信されるデータの範囲は、日本国内のみです。運用局よりサービス範囲が明示されています。海上は近海に限りますのでご注意ください。
配信停止などの情報
CLASデータは運用局のメンテナンスなどで停止や精度劣化などが予定されることがあります。これはNAQUと呼ばれる情報で、内閣府のホームページで公開されています。重要なご利用などの場合は事前にご確認いただく必要があります、
ネットワークIDとグリッド
NAQUでは個別のネットワークIDといった表現がされることがあります。以下にネットワークIDとグリッドを示します。誤差情報は、このグリッド・衛星・シグナルといったマトリックスで配信されます。
ネットワークIDは地図上のマーカー の先頭の数字です。例 3-4 3がネットワークIDで4がグリッド番号です。
データセットと初期化時間
CLASデータは毎秒 250byteで30秒で1セットのデータです。最初の250byteには以降(29秒分)のデータの並びなどを示す内容が含まれます。このため、1秒目のデータを受信できないと後に続くデータを処理できません。この仕様から、初期化(RTCMの生成)には受信開始タイミングにより30秒~最大1分かかります。
車などでの移動
自動車などで広範囲に移動する場合は注意が必要です。道路には頭上の構造物(大型看板、歩道橋、高架橋、トンネル、アンダーパスなど)がたくさんあり、それらが1秒目のデータ受信を遮った場合は、そのデータセットは処理できません。また、2~30秒目までのデータの一部でもそのデータセットが無効なこともあります。
高速道路で高架橋が連続する場合などでは、長い距離でRTCMが出力できなくなります。また、長いトンネルなど受信ができない状態の後は、再出力までに時間がかかります。
ただし、多少データが古くなってしまいますが、DG-PRO1RWS側では、RTCMの有効時間をデフォルトで1分に設定しています。1分間は新しいデータがなくともRTKを持続します。
VRSCについて
この章で説明するのはVRSCを使ったCLAS測位の仕組みです。RWS.DC(M)などCLAS対応受信機の場合は読み飛ばしてください。
VRSCの主な機能
VRSCでは主に以下の2つのことが行えます。
- 仮想基準局サーバー
- QZSS L6D/E 受信機 (RAWデータの出力)(一般的には使用されません。実験・研究といった用途専用です)
RAWデータの出力はBluetoothまたはTCPClientのいずれかを選択できます。尚、仮想基準局サーバー(RTCM生成)とRAWデータ出力の同時実行はサポートされません。いずれか一方のみの実行になります。
VRSC対応する移動局用のレシーバ
VRSCは弊社のRWPまたはDG-PRO1RW(S)でご利用可能です。
他社製のレシーバにて、VRSCで観測データを出力するようにするには、以下の条件を満たす必要があります。尚、弊社ではサポートできませんのでご了承ください。
- VRSCへのアクセスはNtrip Clientにて192.168.4.1:2101へアクセスする(マウントポイント VRSC、ユーザー名、パスワードは空)
- u-blox RXM-SFRBX メッセージをVRSCに送信する(GPS, QZSS Galileoのもののみで、それ以外の衛星のものは送信不可)
- 5秒おきにu-blox NAV-PVTメッセージをVRSCに送信する。(5秒間隔以外はサポート外)
このF/Wを使ってL6Dを直接処理したい場合はマウントポイントを「RAW_L6D」とすることで生のL6Dデータを受信できます。 (RXM-SFRBXなどの送信は必要)
尚、旧モデルのDG-PRO1RWやMB(ムービングベース)などで使用される場合は、レシーバのWiFiが使用できません。そのため、AndroidのWiFiを使用してVRSCに接続します。AndroidのWiFIでVRSC以外への通信は出来なくなりますのでご注意ください。通常WiFIでの通信の主な目的はRTCMの受信ですので、ほとんどの場合は問題ないかと思います。
WiFIアクセスポイントとBluetooth
VRSCはWiFIアクセスポイントとして動作します。仮想基準局として使用する場合はこのアクセスポイントを通じて通信します。
Bluetoothも装備されていますが、こちらは設定とRAWデータの出力に使用されます。通常の用途でこれを使用する必要はありません。
データの流れ
VRSCとDG-PRO1RWSは下図のように構成されます。
VRSCとDG-PRO1RWSはWiFiで通信します。2台の本体をすぐ近くに置くようにしてください。野外で障害物がなければ10m程度は離れていても通信可能です。(周囲の電波環境によって変化します)
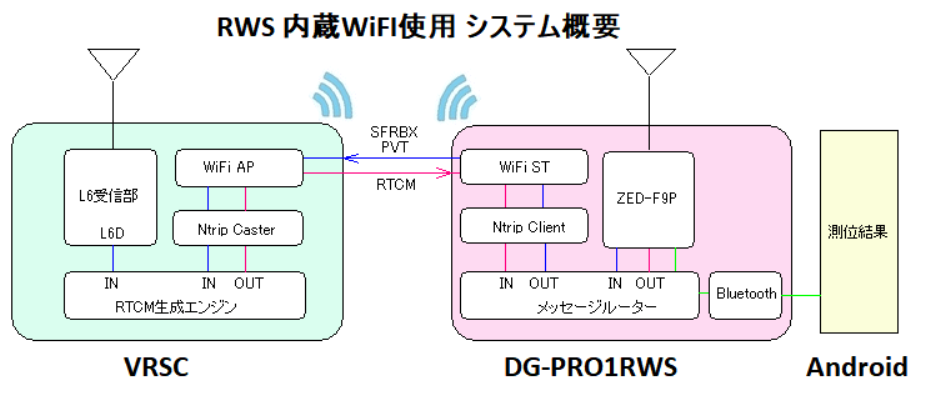
- 前モデルのDG-PRO1RWの場合は、WiFiを持たないため図中の[WiFi ST] と[Ntrip Client]はAndroidのDrogger-GPSで実行されます。
- DG-PRO1RWSをMoving Baseで使用する場合はWiFiをNtripClientとして使用できないため、[WiFi ST] と[Ntrip Client]はAndroidのDrogger-GPSで実行するようにします。
- レシーバ内蔵WiFiでVRSCに接続するか、Drogger-GPSでVRSCに接続するかは、[レシーバのNtripを使う]で切り替えることができます。
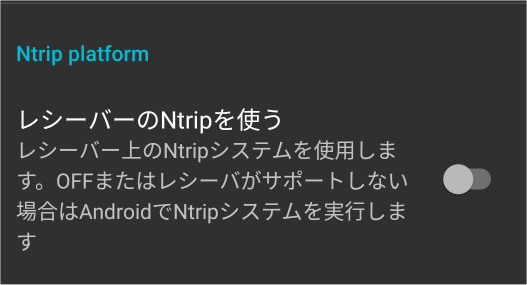
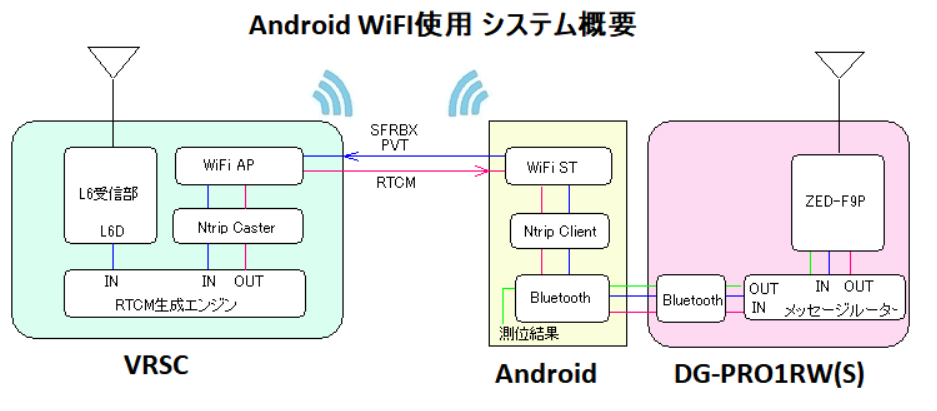
[レシーバのNtripを使う]がOFFの場合の構成は下図のようになります。
仮想基準点と移動体
VRSCはDG-PRO1RW(S)から送信された位置情報の位置を仮想基準点として、その点での観測データ(RTCM)を生成します。移動体の場合、新しい位置が前の点から1kmを超えた場合に仮想点を更新します。
すなわち、1km進むごとに新しい点での観測データが出力されます。
DG-PRO1RW(S)からみると、時々基準局のアンテナ位置が変わることになります。この切替をハンドオーバーと言います。DG-PRO1RW(S)はRTKが切れることもなく、何事も無かったかのようにハンドオーバーします。
CLASの詳細
座標
CLASを用いて得られる座標は、今期座標(現在の座標)です。測量成果や地図などで使用される元期座標にするにはセミ・ダイナミック補正が必要です。
RTKに使われる衛星と信号
CLASで配信される誤差情報の対象衛星と信号に対し、DG-PRO1RW(S)で受信できる対象衛星と信号は完全に一致しているわけではありません。図にすると以下のようになります。
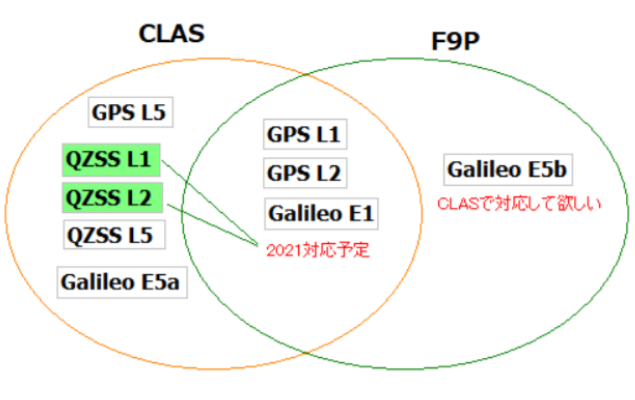
- オレンジの円: CLASで配信される対象衛星と信号
- グリーンの円: DG-PRO1RW(S)のRTKで処理できる衛星と信号
- 両方の円の重なったところがVRSC+DG-PRO1RW(S)で利用可能な信号
VRSCではこの円の重なった、GPS L1/L2 Galileo E1 と今後対応予定のQZSS L1/L2 のRTCMが生成されます。
Galileo E5bはDG-PRO1RW(S)で処理できるものの、CLAS側での配信がありません*3。 VRSC最新ファームウェアではGalileo E5bのデータを独自アルゴリズムにより生成可能になりました。詳しくは以下の記事をご覧ください。
ZED-F9Pの最新ファームウェアではQZSSもRTKで利用可能になりました。詳しくは以下の記事をご覧ください。
ミスFix
RTKにおいて、間違った測位解になることをミスFixと言います。ミスFixは多くの場合、マルチパスなど観測環境によるものがほとんどです。しかし、CLASの場合は実測値ではなく計算値のため、前述の精度と同じ追加の誤差を含んでいます。そのため、通常のRTKに比べミスFixする可能性が高くなります。
ミスFixの検知
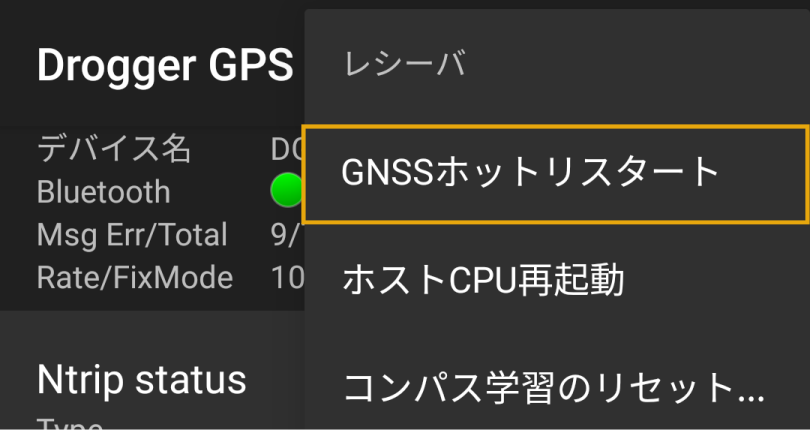
CLASデータの誤差により偶然にミスFixが発生する場合は、Fix後にレシーバの測位状態をリセットし繰り返し数回Fixさせることで比較的短い時間で異常値かどうかを判断することができます。 Drogger-GPSではWaypointログ機能でこの処理を自動化する予定です。
手動でも、以下の方法でレシーバの測位状態をリセットができます。
- メイン画面の [... メニュー] - [レシーバ]-[GNSSホットリスタート]をタップします。
農業トラクターのナビなどの場合は、農地内のどこかに検証ポイントなどがを設けると判定が容易にできます。搬送波測位の場合、オープンスカイで搬送波をロックできていればFixが持続します。この特性を利用してFixした時点でミスでないことを判断できれば、その後の測位はミスFixでないと判断できます。
山林での利用
山林では携帯電波の届かないところが多くあります。このような場所でもCLASであれば高精度な測位を行うことが可能です。
樹木下でのVRSC
アンテナの上にある樹木の影響ですが、まずVRSCなどはL6のデジタルデータ受信機です。これは、曖昧さのない受信「できる/できない」のどちらかになります。上空に樹木が繁っている場合はほぼ受信できません。ただ、みちびきの天頂にある衛星は、概ね仰角70°以上にありますので狭い開空でも受信可能です。
このようにCLASを山林で利用するには、上空に樹木のない場所が必要になります。
樹木下でのFIX
VRSCは開けた場所に置き、そこから(VRSCと通信可能な)数メートル先の樹木下を想定します。この場合、問題はDG-PREO1RWSがFIXを得られるかという点になります。これはVRSCに限らず通常のRTKでも難しい問題です。樹木の密度や衛星配置、誤差情報の精度など条件によって差があります。できるだけ、開空場所でFIXさせてから樹木したへFIXを切らさない様に移動することで高精度に測位できる場合があります。
山林内での基準点作成 (境界測量等)
山林内でCLASが活躍するのはこの用途になります。上空は開けた場所に絶対位置精度のある基準点を設けるのに適してします。目的の測位点が樹木に覆われた中にある場合、そこを基準に別の計測方法などと組み合わせて測量可能になります。
実測データ
以下に具体的な観測データを示します。これらのデータは、特に選ばれたものでなくごく普通に取られたデータです。
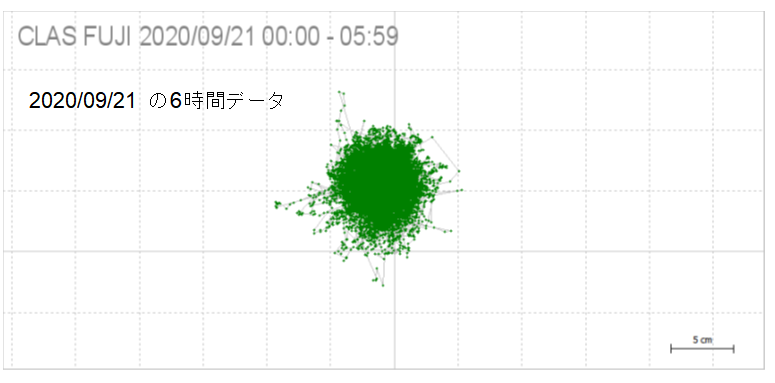
水平精度
ここでは2つのデータを紹介します。2つとも車に取り付けたアンテナで測位したデータです。
最初の図は、富士スピードウェイでの完全なオープンスカイでのデータです。
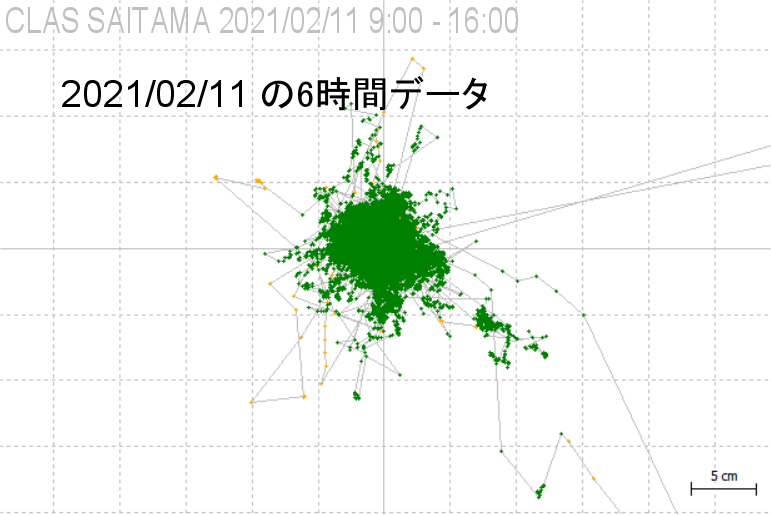
下のデータは埼玉でのデータです。非常に強風で車が揺れていたことと、周囲に建物がある場所のため上図よりは悪い結果となってります。西北西側にあった建物等の影響で若干ミスFixが見られます。
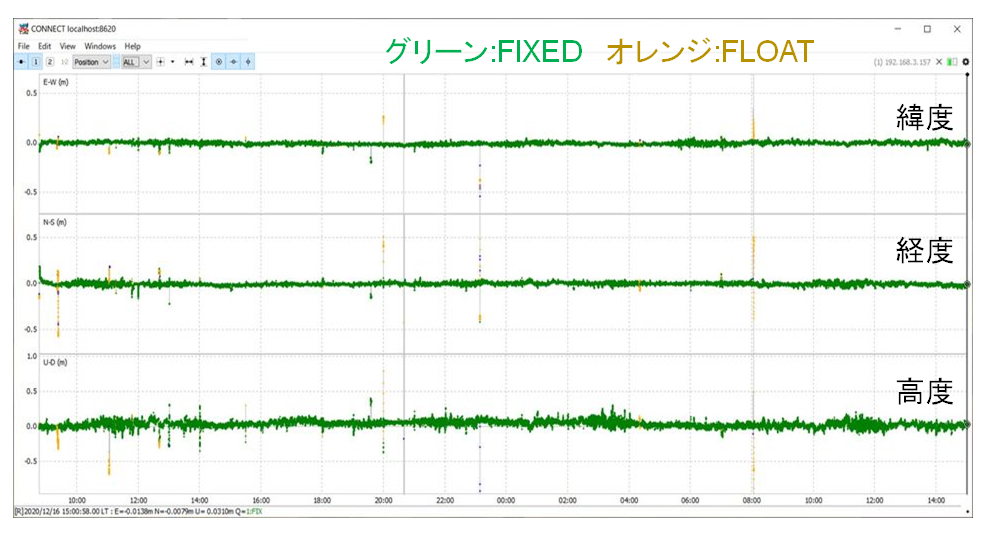
FIX率
下図は24時間の観測データで、FIX率は99%以上となっています。
フィールドテスト

車輌(ハイエース)のルーフにVRSCとDG-PRO1RWSの標準アンテナを貼り付けていくつかのポイントを実測した結果です。(その際のWaypointログ)
- レシーバ設定は、Drogger-GPSのデフォルトで、Ntrip Clientのみ基準局に合わせて変更しています。
- 水平誤差は、VRSCでの計測と弊社の実基準局を使用したRTKでの計測の差としています。
- Fixまでの時間はDrogger-GPSの「GNSSホットスタート」を実行してからFixedになるまでの時間です。
- リファレンス基線長は実基準局と計測ポイントまでの距離です。
| 場所 | 水平誤差 (cm) |
Fixまでの 時間(sec) |
リファレンス 基線長 (km) |
備考 | 画像 |
|---|---|---|---|---|---|
| 市街地1 | 1.491 | 37 | 0.30 |    |
|
| 市街地2 | 2.753 | 121 | 0.03 |    |
|
| 農地 | 1.955 | 31 | 1.50 |   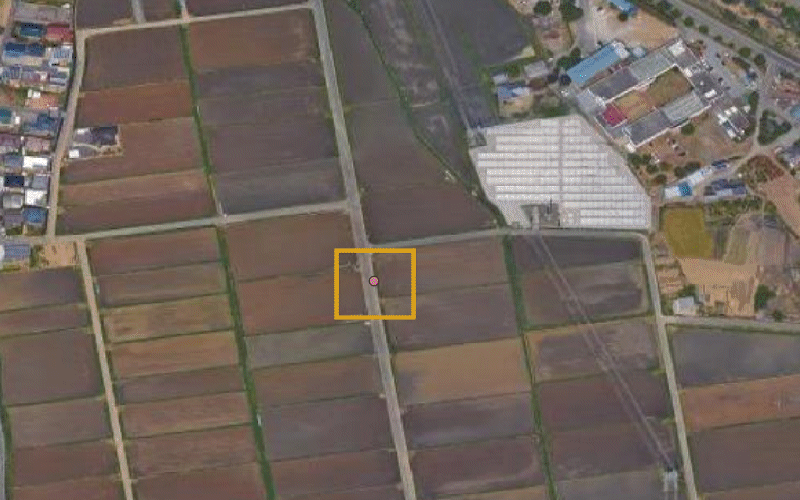 |
|
| 山林 | 5.801 | 170 | 8.70 | ミスFix 1回あり |
  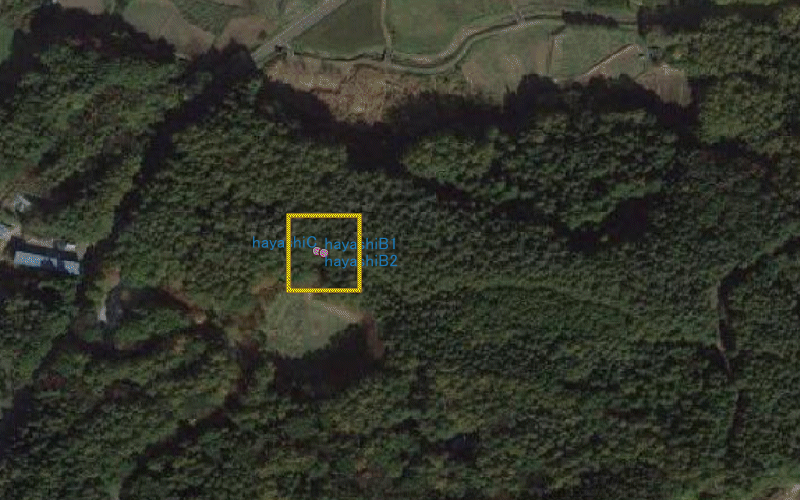 |
| 山間部道路 | 3.163 | 90 | 9.00 |   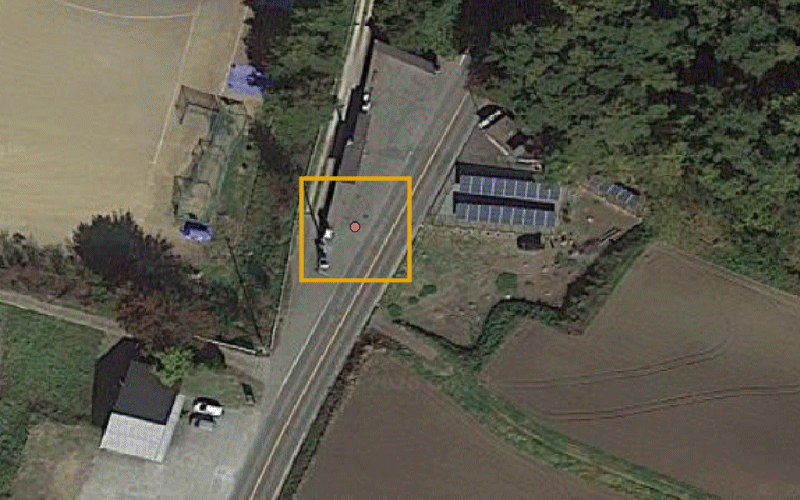 |
水平誤差、6cm以内にすべて収まっています。山林での計測において一度ミスフィックスがありました。
まとめ
- CLASは、通信インフラなしに衛星の電波だけでRTKを可能にします。
- VRSCは仮想点における観測データを生成するため、アンテナ位置を事前に測量する必要はありません。どこでもすぐに基準局になります。
- 重要な業務のときは、事前にCLASの運用状況をNAQUで確認しましょう。
- 仕組み上、通常のRTKに比べてミスFixがおきる可能性が高いことを知っておきましょう。GNSSリセットをうまく使って検出しましょう。
いろいろ難しいことを書いてしまいましたが、オープンスカイなら電源を入れれば普通にすぐにFIXします。是非VRSCやRWS.DC(M)でCLASを!
Enjoy with Drogger
Droggerの詳細・ご購入は https://www.bizstation.jp/ja/drogger/