RTK Moving baseとは
RTK MovingBaseは2つの移動するGNSSレシーバーで同時刻に測位し相対位置をリアルタイムに出力する仕組みです。 基準とするレシーバーをMBベース、もう一方をMBローバーと呼びます。
RWS.DCMの場合は、MBベースとMBローバーの受信回路は1つのRWS.DCMに組み込まれ、アンテナのみが別々になります。
基準となるレシーバーが移動するのでMoiving baseと呼ばれます。このMoiving baseですが基準局側のみを指すのではなくシステム全体をMoiving base(MB)と呼んでいます。
できること
Moving baseで得られる測位データは以下のものです。
- MBベースから見たMBローバーの方位と距離
- MBベースから見たMBローバーの南北方向の距離と東西方向の距離
- MBベースから見たMBローバーの高度差
*1 RWS.DCMは、ヘッディングに特化しているため、2つのアンテナは同じ移動体への固定のみサポートされます。2つのアンテナの自由移動はサポートされません。

測位精度
MBベースからMBローバーに補正情報をリアルタイムに送信することで、条件がよければ1cm+CEPでベース- ローバー間の相対位置を測定できます。 また、MBベースはRTK移動局になることも可能です。MBベースをRTK移動局として運用すれば絶対的な位置として測位できます。
MBベースはRTK移動局にもなる
MBベースはRTK基準局から補正データを受け取って自身の位置を測位すると同時に、MBローバーのための補正データを生成します。
※ RWS.DCMを除く2台構成の場合、受信機間の通信でWiFiを使用するため受信機のNtrip Clientは使用できません。Drogger-GPSのNtrip Clientで補正データを転送するように構成します
リアルタイム
リアルタイムMoving baseで難しいところは2つのGNSSレシーバーでの測位時間の同期です。同じタイミングで測位したデータを用いなければなりません。 それには更新レートが同じ周期で補正データを高速にローバーに転送することが必要です。
Base - Rover間通信
RWS.DCMの場合、内部回路で通信が行われます。
2台構成のMBは、内蔵WiFiを利用してピアツーピアで補正データを送受信します。互いにWiFi電波が届く距離であればケーブルなしで利用できます。
必要な機材
RWS.DCMの場合は、1台のRWS.DCMと1台のAndroid端末です。測位結果をAndroidではなく他の機器で処理するような場合はAndroidが不要な場合もあります。
2台構成の場合は、DG-PRO1RWS(.DC) 2台です。Androidd端末は1台でも可能ですが2台の方が簡単で便利です。MBローバーの設定後は、通常Androidは1台で足ります。
利用形態
利用形態は大きく分けて以下の2種類です。
- ベースとローバーの距離は固定
- ベースとローバーの距離は自由移動 (RWS.DCMは非サポート)
形態ごとに利用用途が異なっています。
MBベースとMBローバーを同じ移動体に固定する場合 (GNSS ジャイロ)
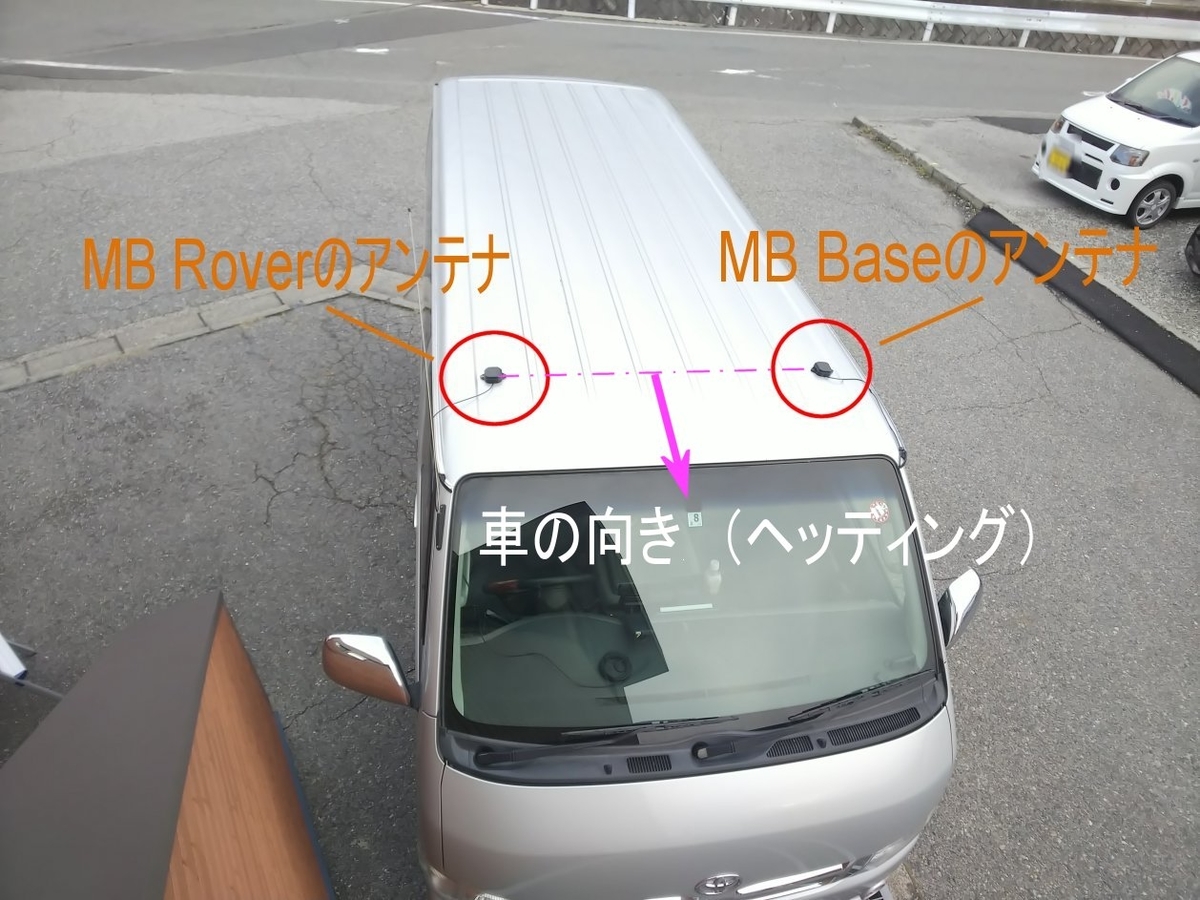
例えば船の船首にMBローバー船尾にMBベースを設置すると船の向き(方位)を知ることができます。いわゆるGPSコンパス(2軸GPSジャイロ)になります。これは船が静止している状態でも計測可能です。もちろん、自動車・トラクター・重機・ドローンなどでも同様です。
さらに、このコンパスは磁気を使用するものに比べてはるかに正確に測定できます。MBローバー・MBベース間の距離25cmで±0.8°、1mで±0.4°*1と極めて高精度です。
また、MBローバーとMBベースの配置により、ロール(roll)またはピッチ(pitch)のいずれかを計算できます。(ただし、使用するアンテナの指向性により計測可能アングルに制限があります)

尚、MBローバーをもう一つ追加すると3軸GPSジャイロになりますが、通信レートの都合上現在のところサポートされません。
MBベースとMBローバーの距離が変化する場合
例えば、ドローンで走行する自転車を上空から撮影するとします。自転車にMBベース、ドローンの機体にMBローバーを載せるとMBローバーは常に自転車の方向と距離・高さを計測できます。これに自動操縦を加えると自転車の追尾をすることが可能になります。いわゆるドローンのフォローミー機能です。RWSではこれをセンチメートル級の高精度で行うことができます。
他にも、アーム付きの重機などのアームの方向と距離・高さ、クレーンの先端位置などがリアルタイムに高精度で測位できます。
測量用途では、ベースを基準にcmでの距離表示によりくい打ちなどがより直観的に行えます。その際にDMPによる傾斜補正も使用可能です。
仕様など
最大計測レート
計測レートは選択するGNNSの数によって変わってきます。すべての選択肢で米国のGPSは必ず含める必要があります。
| GNSS種の数 | レート |
|---|---|
| 4 (GPS+GLO+GAL+BDS) | 5Hz |
| 3 (GPS+ xxx+ xxx) | 5Hz |
| 2 (GPS+xxx) | 8Hz |
| 1 (GPS) | 10Hz |
ヒント
- 2台構成の場合、通信状態が悪くデータの転送が間に合わない場合はレートが低下します。
- 2台構成の場合、距離が遠くなることで電波強度が低下し、転送レートも低下します。
- 捕捉衛星数が多くなればなるほどデータ量が増します。うまく衛星を絞ることで安定した転送レートが確保できます。(例 GPS+GAL+BDSで5Hzで使用する)
MBベースとMBローバーの最大距離 (2台構成の場合)
ベース・ローバー間の通信はWiFiによって行われます。従って、最大距離はWiFi電波の到達距離に依存します。平地で障害物の無い場所での実験では50mほどまで利用可能でした。(あくまでも参考値としてください。周囲のWiFI電波環境等に左右されます)

MBローバーの数
1つのMBベースに対するMBローバーの台数は、現状の通信方式の場合1台までです。
MBベースで測位結果を受信可能
MB測位計算はMBローバーで行われます。しかし、GNSSジャイロを構成しMBベースをRTK移動局とした場合、ベースはAndroidでBluetooth通信する必要があります。そこでDG-PRO1RWSではMB測位結果をローバーからベースに転送するようにしています。こうすることでMBベースでGNSSジャイロを使用できます。同時にMBローバーでAndroidを不要にできます。
DMP傾斜補正の併用
傾斜補正の併用で意味があるのは、ベース - ローバー間の距離が任意移動できる場合です。例えば、土地に1m間隔でマーキングするような場合、ベースを基準点に置きローバー受信機をポールに取り付けます。DMPの取付状態を正しく設定し傾斜補正を有効にします。これで常にポールを正しく垂直にしたときのアンテナ間距離が簡単に測位できます。(地面の傾斜・波うち・凹凸による高さ差は現在考慮されていません)
DMPとGNSSジャイロ
DMPとGNSSジャイロはその目的がほぼ同じです。また、RWSではベースでもMB測位結果を受け取ることができます。MBの役割別に DMPとGNSSジャイロ補正の有効/無効を示します。
MB役割別 DMP/GNSSジャイロ補正の有効/無効
| DMP | GNSSジャイロ | |
|---|---|---|
| ベース | x | 〇 |
| ローバー | 〇 | x |
その他
MBベースとMBローバーの更新レート・選択衛星は同じ値でなければなりません。
アンテナ等の設置
アンテナの設置
まずアンテナは、従来のRTK同様 周囲に電波を反射したり妨害するものがなるべくない状態にするのが基本です。それに加えて利用用途ごとに以下の注意が必要です。
MBベースとMBローバーを同じ移動体に固定の場合
MBベースに対してMBローバーはまっすぐ前方もしくは右に90°回転した方向のいずれかに設置します。また、パッチアンテナの場合同じサイズと形状のグランドプレーンを使用し、アンテナケーブルの取り出し口なども同じ方向に揃えます。

2つのアンテナ距離は25cm以上を確保します。長ければ長いほど方位精度が向上します。
MBベースとMBローバーの距離が変化するもの
こちらの場合は特に制限はありませんが、WiFi電波の届く範囲になります。アンテナケーブルの長さを利用してレシーバー本体を近づけるようにします。
レシーバーの設置 (2台構成の場合)
レシーバー間はWiFiにより通信を行います。レシーバー間に電波の障害物があると通信がうまく行えないか不安定になります。一方のレシーバからもう一方が直視可能な位置がベストです。
レシーバ設定
RWS.DCMではMBに関する設定は必要ありません。電源ONでMovingBaseが開始されています。デフォルトでは、アンテナ距離固定で、ローバー側を右側配置としています。
以下は2台構成の場合について説明します。
設定の前にDrogger-GPSはバージョン 2.4.83以上の最新に更新します。またRWSのファームウェアは1.1.16以上に更新します。
以下ではAndroid2台でDrogger-GPSにて、ベース・ローバーそれぞれで使用する前提で説明します。
尚、RTK基準局が有効になっているとMoving Baseの選択ができません。まず、RTK基準局はOFFにしておいてください。
MB Roverを構成する
MB RoverはRTK移動局と併用できません。MB Roverを選択するとRTK移動局はOFFになります。
- Drogger-GPS [設定]-[...メニュー]-[デフォルトに戻す]をタップします。
- [GNSS]で必要な衛星を選択し、[計測更新レート]で前述の最大更新レート以下のレートを選択します。
- [MB (Moving base)]をタップします。
- [役割]をタップし、[MB Rover]を選択します。
- [WiFi]チャンネルを選択します。(通常は5のままでOKですが、近くに同じチャンネルを使用しているWiFiがある場合は他のチャンネルを選択します)
- [BASEから見たアンテナ位置]を指定します。ジャイロを構成する場合は、固定タイプでなければなりません。
MB Baseを構成する
- Drogger-GPS [設定]-[...メニュー]-[デフォルトに戻す]をタップします。
- [GNSS]と[計測更新レート]をMB Roverと同じ設定にします。
- [MB (Moving base)]をタップします。
- [役割]をタップし、[MB Base]を選択します。
- [WiFi]チャンネルを選択します。チャンネルはMB Roverで設定した番号と同じにします。
MB BaseをRTK移動局にしたい場合は、RTK移動局としての設定を追加します。絶対位置が必要でなければRTK移動局でなくとも構いません。
DMPとGNSSジャイロ
DMPとGNSSジャイロはその目的がほぼ同じになります。GNSSジャイロを構成した場合、設定内のDMPに対するものがGNSSジャイロに適用されます。
但しこれは、MBベースでのみです。
具体的にはローパスフィルター・コンパスオフセット・ロールオフセット・ピッチオフセットが有効です。
動作確認
ともに設定が済んだだら,2台とも電源を入れBluetooth接続します。まずはローバーから確認します。
ローバーの確認
メイン画面のDMP表示の上に Moving Baseの各項目が表示されているか確認します。また、RWSの右から2番目のLEDを確認します。
LEDの意味は以下の通りです。
| 順序 | 状態 | LED |
|---|---|---|
| 1 | 未実行(停止中) | 消灯 |
| 2 | 初期化中 | ゆっくり点滅 |
| 3 | データ送信中 | 点灯 |
| - | 送信失敗 | 点滅 |
ベースとの通信が開始できるとLEDが点灯します。しばらくすると、 Moving Baseの各項目に値が表示されるようになります。
Fixモードに表示されるワードの意味は以下の通りです。
| 表示ワード | 意味 |
|---|---|
| MB | Moving Baseモードです |
| POS | 位置情報が有効です |
| HEAD | 方位情報が有効です |
| FIX | RTK FIX解です |
| FLOAT | RTK FLOAT解です |
通信状態の確認
通信状態はLEDを見ることで簡単に判断できます。点灯であれば問題ありません。距離がながくなったり不安定だと点滅になったりします。
ベースの確認
ローバーが正常なのを確認できたらベースを確認します。ベースの表示もローバーと同様です。ただし、ベースの場合ローバーとの通信できていない場合Moving Baseの項目は表示されません。(ローバーは通信の状態にかかわらずMoving Base項目が表示されます)
GNSSジャイロを構成した場合、DMP/MB Gyroビューでyaw roll pitchの値を確認できます。
補正の適用確認
今回のアプリリリースで新しく加わった機能で、GNSSジャイロやDMPコンパス・傾斜補正によって補正された値は緑で表示されるようになりました。

NMEAの出力
Moving Baseの画面で表示されている内容をNMEA $PDGRPで出力できます。設定はDrogger-GPSのNMEA出力で行えます。
出力される値は、MB Roverで計算されたBaseに対する相対位置と方位角など手を加えないそのままの値です。ただし、アンテナ配置が左右方向の場合に限り、方位角を左に90°回転させた値に置き換えて出力します。
$PDGRP, Delta North, Delta East, Delta Down, Distance, Heading, HeadingAccuracy, fixMode, stationID<*Checksum>
FixModeの詳細
FixModeはビットフラグになっていてビットごとの意味になります。
| 画面表示 | 値 | 意味 |
|---|---|---|
| POS | 4 | 位置情報が有効です |
| FLOAT | 8 | RTK FLOAT解です |
| FIX | 16 | RTK FIX解です |
| MB | 32 | Moving Baseモードです |
| HEAD | 256 | 方位情報が有効です |
| NORMALIZED | 512 | 相対位置(E N D)は距離を1mとした正規化された値です |
staionIDの詳細
$PDGRPの出力はMovingBaseのものと、RTKの基準局-移動局の相対位置の2種類があります。MovingBaseのものはstaionIDが-1で出力されます。
Androidなしで動作させる
動作確認ができましたら、設定内容をレシーバーに保存することで、電源ONですぐに動作させることができます。ただ、MBベースをRTK移動局とする場合はNtripクライアントとしてAndroidが必要ですので、レシーバーに保存する意味はあまりありません。
- Bluetoothが接続された状態でメイン画面の ... メニューをタップし、[レシーバー起動設定]をタップします。


- [現在のレシーバー設定で起動]を選択し[OK]タップします。

尚、デフォルトの起動設定に戻したい場合は、手順3で[デフォルト設定で起動]をタップしてください。DG-PRO1RWSの出荷時設定に戻ります。
以降、電源を切って入れ直した際に、指定時の設定で動作します。
Enjoy with Drogger
Droggerの詳細・ご購入は https://www.bizstation.jp/ja/drogger/
 | DG-PRO1RWS | ZED-F9P搭載 | 2周波 RTK-GNSS | Bluetooth5.0 ¥69,800 (税別 BizStationサイト) u-blox ZED-F9P GNSSモジュール搭載 2周波 RTK-GNSSレシーバ 。受信チャンネル数184 GPS みちびき(4機フル対応) GLONASS BeiDou Galileo 同時受 ... 詳細・購入 問い合わせ 会社情報 |
| ¥69,800 (税別 BizStationサイト) u-blox ZED-F9P GNSSモジュール搭載 2周波 RTK-GNSSレシーバ ... |
*1:GNNSモジュールZED-F9Pの仕様書による