まず、お知らせから。DG-PRO1RWにアドオン可能な拡張モジュールを2020年1月末に販売開始いたします。
拡張モジュールを今お使いのDG-PRO1RWにアドオンして機能を大幅にアップできます。

また、DG-PRO1RWSecondとしてDG-PRO1RWが新しくこの拡張モジュールの機能が標準搭載されます。(DG-PRO1RWSの外観は従来のDG-PRO1RWとほぼ同一です)
尚、DG-PRO1RW+拡張モジュールとDG-PRO1RWSは同等の機能ですので以降はともにDG-PRO1RWSと表現します。
主な機能
9軸デジタルモーションプロセッサー(DMP)
加速度センサー・ジャイロセンサー・磁気センサー 各3軸、合計9軸のセンサーとそれらからリアルタイムに姿勢を計算する専用プロセッサーです。
- ヨー・ピッチ・ロール角の出力。(NAV-ATTメッセージ、拡張NMEAメッセージ)
- 標準NMEAの方位角をヘッディング角への置き換え処理。
- ピッチ、ロール角分の傾斜による位置ズレの補正。(基準点からのアンテナ高さ入力必要)
方位またはヘッディングローパスフィルター
- 方位角またはヘッディング角の出力を安定化するローパスフィルター機能。(従来Androidで実装されていた機能をレシーバー内で実行可能にしました)
WiFi機能
- Ntripサーバーをレシーバ内部で実行可能。基準局の運用にAndroidを不要にできます。
- Ntripクライアントをレシーバ内部で実行可能。別途Ntripクライアントソフトウェアを準備する必要がありません。
起動時の設定保存
- レシーバー電源投入時の設定を指定可能に。Ntripサーバーと合わせると電源を入れるだけで基準局を開始できます。Ntripクライアントと組み合わせると電源を入れるだけでRTK移動局として動作します。
自動ボーレート設定
- u-centerなどでF9Pのボーレートを変更しても、拡張モジュールが自動で変更されたボーレートを検出して元に戻します。
それぞれの機能の詳細を何回かに分けてご紹介したいと思います。今回はデジタルモーションプロセッサーです。
デジタルモーションプロセッサー
デジタルモーションプロセッサーは英語の頭文字を取ってDMPと呼ばれます。
なぜDMPが必要か?
ヘッディング
GNSSは動いていれば正確に動いている方位を得ることができます。当たり前ですが、止まっていると進行方向の方位はありません。
ところが車などの場合、止まっていても車の向きは存在します。この向きをヘッディングと呼んでいます。動いていれば進行方向とヘッディングはほとんどの場合同じですのでGNSSでもわかります。しかし静止・極低速・後退などの場合は(1台の)GNSSだけではヘッディングを正しく得ることができません。
よくカーナビで駐車場から出る際など、少し動くまで車がどっちを向いているかわからないといった経験があるかと思います。
DMPがあると前記のような状態でも正確なヘッディングがわかるようになります。低速での移動はGNSSの示す方位は不安定ですがそれもDMPと協調することで安定した方位を得ることができます。
傾斜補正
GNSSの測量などではポールの上にアンテナを付けて位置を計測します。測りたい点はポールの尖った先端です。それにはポールを正しく垂直に立てる必要があります。傾いていると空から見たアンテナ位置とポールの先端がズレてしまうからです。

しかし、ポールの傾き角度と傾き方向、先端からアンテナまでの高さがわかると、計算で先端の位置を求めることができます。これが傾斜補正です。要求精度にもよりますが、傾斜補正をうまく使うとポールを概ね垂直にすればよく、厳密に垂直を出す必要が無くなります。
この例は測量ポールですが、凸凹な路面や傾斜地を走行する車両でも同様です。車軸を基準に位置を測りたい場合は、車軸からアンテナまでの高さで計算します。
これらがDMPを必要とする理由です。
尚、トンネルなどで衛星電波が受信できない際に位置を推測する、IMU推測航法には現在のところ対応しておりません。
DMPの詳細
ハードウェアの特徴
DG-PRO1RWSのDMPは、最新の9軸センサーとプロセッサーが1つのモジュール内に組み込まれ、外部と通信することなしに加速度センサー・ジャイロセンサー・磁気センサーの値からヨー・ピッチ・ロール角の出力します。通信を不要とすることで高速なサンプリングレートで、より正確な値を計算し出力できます。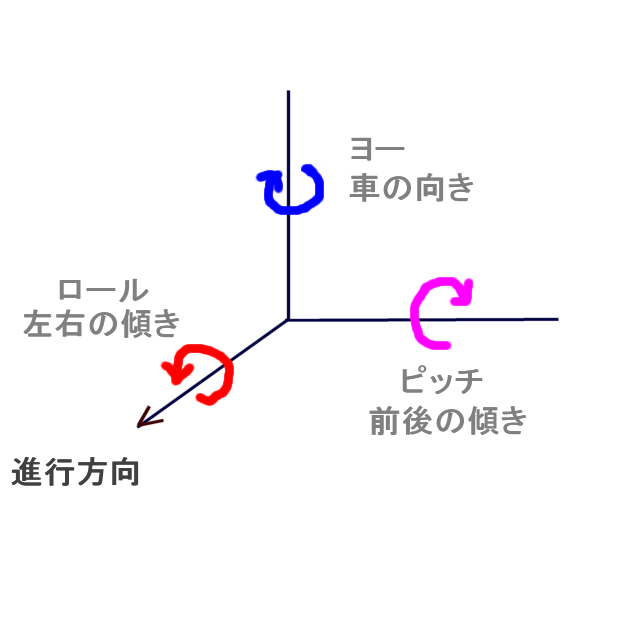
従来、加速度センサー・ジャイロセンサーを使った6軸のDMP + 3軸磁気センサーの組み合わせは良くありましたが、DG-PRO1RWSは9軸のDMPです。ヨーの値は磁北からの角度を直接得ることが可能になっています。
各センサーの機能と計算
- 加速度センサーは、地球上の重力加速度(9.8m/sec*2)を測定することで静止または定速状態であれば3軸各方向の傾きがわかります。しかし回転しているかどうかはわかりません。
- ジャイロセンサーは、回転角速度を計測できます。これは速度のなので変位した角度を求めるには時間で積分します。このため計測レートが高速でないと角度誤差が大きくなります。また、時間の経過と共に誤差(ドリフト)が大きくなっていきます。定期的にドリフトのリセット(補正)が必要です。
- 磁気センサーは、磁束密度を計測します。これには地球の地磁気も含まれます。地磁気の強さは場所によって異なります。このためどの強さが真北なのかといったことは地面と平行な状態で一回転してみないとわかりません。また周囲の磁気によっても変わってきます。
デジタルコンパス補正の学習
磁気センサーで正確な磁北からの角度を得るには周囲環境やセンサー誤差などのオフセット校正が必要ですが、これはDMPが自動的に行ってくれます。さらに、得られたオフセットはレシーバー起動時に復元され学習していきます。
ヘッディング計算
デジタルコンパスは地磁気を捉えますが、地磁気は場所や環境によって変化するため常に正しい磁北を指すとは限りません。そのため、 ヘッディング計算は移動時のGNSSの示す方位を正として角度の変化量をもとに計算されます。
計算は10Km未満の場合のみです。10Km以上の場合、前進・後退の判定のみ行われます。
ローパスフィルター
ローパスフィルターは方位またはヘッディングを滑らかに出力するよう補正します。DMPコンパスがONの場合はヘッディングを、OFFの場合はGNSSの方位の値を補正します。フィルター強度は5段階で調整できます。
傾斜補正
傾斜補正がONの場合、移動スピードに関わらず常に計算し補正されます。補正された値は、$GxGGAとNAV-PVTメッセージに反映されます。緯度、経度、高度が補正された値になります。
データ出力
アプリでDMPコンパスをONにすると、モックプロバイダー、$GxRMC、$GxVTGの方位をDMPによって補正されたヘッディングに置き換えます。この置き換えはレシーバー内で行われます。移動方向でなくヘッディングを得たい場合はこれでOKです。
DMPコンパスをOFFにすると$GxRMC、$GxVTGはデフォルトの移動方向です。yawの値を得たい場合はNMEAメッセージの$HEHDT、$PSAT,HPR、$PRDIDを有効にしご自身または対応アプリでハンドリングしてください。($PSAT,HPRはHemisphere社のフォーマットです。)
これらは設定後にBluetooth接続するとレシーバーに保存されます。その後は、レシーバーの電源ONで出力されるようになります。ヘッディング計算、ローパスフィルター、傾斜補正も保存され設定どおりに補正されたNMEAの値を出力します。
以下はそれぞれのフォーマットの詳細です。単位はすべて° (Degree)です。尚、HeadingはDMPコンパスがOFFであればyawの生の値で、ONの場合はGNNSの方位とyawから計算された値です。
$HEHDT
$GxHDT,Heading<*Checksum>
$PSAT,HPR
$PSAT,HPR,pitch, roll, Heading<*Checksum>
$PRDID
$PRDID,pitch, roll, Heading<*Checksum>
$PDACM (加速度センサーの生データ)
$PDACM ,x,y, z<*Checksum>
加速度センサーの生データは一切補正のされないデータです。静止状態3軸合成で重力加速度 9.8m/sec*2とならないのはセンサー誤差です。センサー値を利用する際には、この誤差は補正して使用する必要があります。
DMP関連のNMEAメッセージ(HEHDT PSAT,HPR PRDID PDACM)の出力レートは受信機のF/Wのバージョンによって異なります。
- Ver 4.0以降 常に10Hz
- Ver 4.0未満 GNSSの計測・更新レートと同一
設定と取付
ここで説明する取付の内容はDMPを有効に利用する場合であって、利用しない場合はここでの内容は不要です。
DMPを正しく動作させるために重要なこと
DMPの方位を正確に出すためにレシーバ本体の取り付け時に以下の点を確実に行ってください。アンテナではありませんので念のため。
- 取付は周囲に磁気の影響がない場所を選ぶ。磁気の影響があるかどうかは市販の方位磁石(100円ショップなどのもので十分)で、取り付けたい場所で正しく方位を示すかどうか確認する。

- 取付前に電源の入った状態でXYZ各軸を中心に±2回転させてから取り付ける。車両などへの取付前に、電源を入れてからなるべく取付位置に近いところで、ヨー・ロール・ピッチの各方向それぞれ̟±2回転づつ回させます。こうすることで磁束密度の最小値や最大値などがわかり磁北の計算が可能になります。行わなった場合は実際の走行時の値で磁北が計算がされていきますが色々な向きに走行してようやく正しく方位を示すようになります。
尚、アンテナは本体ユニットと同じ(頑丈な)構造物に固定してください。DMPは本体ユニット内にありますので、アンテナも同じように動くところに固定します。
取付方向の設定
底面を地面と平行に且つ前方面を車両の進行方向に向けて取り付けます。底面と前方面は任意な面を選択できます。
設定は、[取付状態とオフセット]-[ボトム面] と[前方方向]で地面と平行な面と、前方方向の2つの面を指定します。どちらも下図のような図を選択することで行えます。



取付の傾き補正
ヨー・ロール・ピッチそれぞれセンサーや取付の傾きを補正する値を設定できます。値の入力は、[取付状態とオフセット]-[コンパスオフセット]、[ロールオフセット]、[ピッチオフセット]で行います。
また、DMPモニター内の をタップすると、現在の状態を角度ゼロとしてオフセット設定することも可能です。
をタップすると、現在の状態を角度ゼロとしてオフセット設定することも可能です。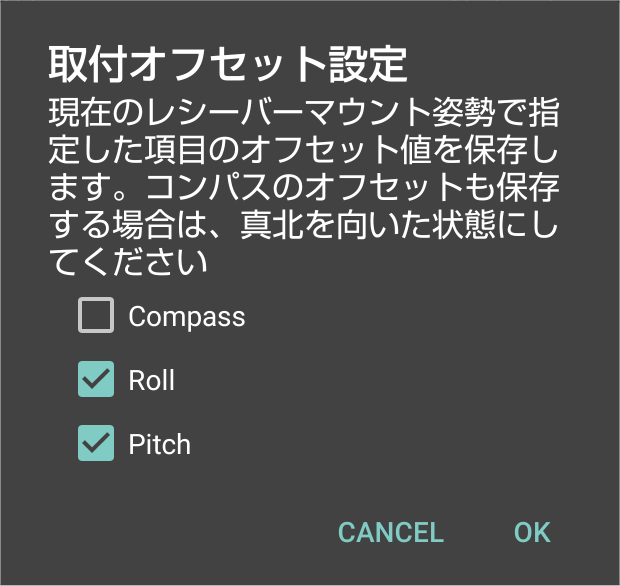
わずか2回のタップでオフセット設定できます。
DMPコンパスとローパスフィルターを有効にする
[低速精度と傾斜補正]-[DMPコンパス]をONにします。DMPコンパスを使う場合は[方位ローパスフィルター]もONし[方位ローパスフィルター強度]を選択してください。
傾斜補正を有効にする
まず、[取付状態とオフセット]-[アンテナ取付高さ]に基準面からのアンテナの高さをmで指定します。小数点以下も入力可能です。
次に[低速精度と傾斜補正]-[傾斜補正を有効にする]をONにします。
DMPの動作を確認する
DMPの動作は設定に関わらず下図で確認できます。3Dの図は、北から南向きに南側にある仮想のユニットを見ている図です。レシーバーを回転させると3Dのユニット図も回転します。
ここで表示される yaw roll pitchは生の値で、何の補正も加えないものです。対して下のマップ上のコンパスはDMPによるヘッディング補正を加えたものが表示されます。

マップ上のコンパスの中心をタップするとヘッディングで地図が回転するモードに切り替えできます。
次回は、WiFiとその他の機能をご紹介したいと思います。
Enjoy with Drogger
Droggerの詳細・ご購入は https://www.bizstation.jp/ja/drogger/