久しぶりにDrogger-GPSの更新を行いました。主にRTK移動局での動作についての更新です。
Beepサウンド
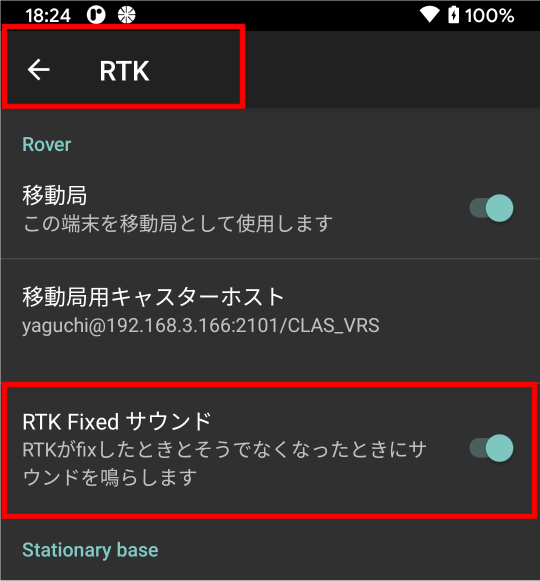
RTKがFIXしたときと、FIXでなくなったときにビープ音を鳴らすようにしました。画面を見ていなくても「Fixしたな」とか「Floatか」といったことが音でわかるようになりました。
ビズステーションでもCLAS受信機の開発で利用していて、画面を見なくてもFixしたことがわかってとても便利です。CLASでなくとも、環境の悪い場所での利用には便利かと思います。
尚、設定画面から戻る際に、Fixしているか否かのキャッシュをクリアします。FIX時に設定画面を出して戻ると必ずFixした時のサウンドが鳴ります。
鳴らない場合は、Androidの設定の「音」で「着信音と通知」の音量をご確認ください。
最低衛星仰角
測位に利用する最低衛星仰角の設定は従来よりありましたが、RTK基準局または移動局の場合、25°未満は25°として処理していました。 今回のリリースではその制限をなくし、設定で入力したとおりの値で動作するように変更いたしました。
RTK基準局または移動局で従来と同じように動作させたい場合は、最低衛星仰角を25°に設定してください。
ステーショナリーモード
単独測位とRTKの両方にて、「Fixed position Rover」という定点観測用のモードを追加しました。RTK Fix時はあまり変わりありませんが、Floatになった際などで動き回る範囲がかなり小さくなります。移動しないことを前提にしていますので、探索範囲が狭められます。

RTK基準局は従来より自動的に定点観測用のモードです。
単独測位でRAWデータを取る際にも有効です。
移動体ではうまく動作しなくなりますので必ずOFFにしてください。
周波数ごとにRTCMの適用状態を表示
受信状態のグラフでは、衛星番号の後ろに DRなどの文字で、RTCMが適用されていることがわかりました。しかし、L1のみかL2も利用されているかまではわかりませんでした。
今回の更新では、「G1R R」といった感じでL2にも適用されている場合、空白とRを追加で表示します。

尚、GNSSのファームウェア HPG1.13以上でないと正しく表示されませんので、ファームウェアのバージョンをご確認ください。
CLAS受信機
ほんの少しだけ来年のお話を。
来年は、CLAS受信機を発売いたします。新しい製品は、みちびきのL6D信号の受信し仮想の基準局として動作します。現在販売しているDG-PRO1RWSやRWPとともに利用する形態です。
新しい製品は、CLASで仮想基準局 (Virtual Reference Station by CLAS)を構築するのでVRSCと呼んでいます。インターネットが無くても日本国内どこでもPPP-RTKが利用できます。

乞うご期待!
Enjoy with Drogger
Droggerの詳細・ご購入は https://www.bizstation.jp/ja/drogger/